

 联系我们
联系我们

Fanuc机器人的理想位置函数是其重要的功能之一。详细分析了发那科机器人的优化位置跟踪自动拾取臂和自动回臂功能,并给出了基本的步骤。
焊接、切割、研磨和涂层的应用调试过程中,经常需要手动每一点在教学机器人轨迹,Roboguide仿真环境,利用CAD的路径跟踪Roboguide接功能,可以选择工件的轨迹,然后编辑路径自动生成离线程序,-繁琐的编程教学过程。在传统的编程教学过程中,有时会出现焊抢、刀头、夹具之间的干扰。自动后臂功能,可自动调整焊抢或刀头的姿态,有效避免干扰。
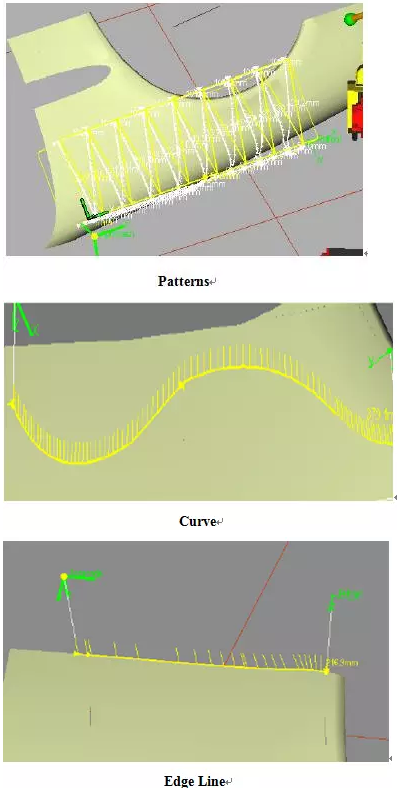
CAD到路径包括绘制路径生成、编辑编辑、查看显示等功能。通常的轨迹路径是用于磨削或喷涂的线、单线和花纹。利用线函数可以捕获导入模型的边界、多段线的轨迹、模型表面多段线的轨迹以及一些样条曲线。pattern函数也可以用来生成trace pattern,如W、triangle、x等。轨迹生成后,可以使用Edit函数对生成的轨迹进行编辑。轨迹分段可采用定值法、设定值法或混合法。轨迹也可以合并,包括向前、向后和全部合并。轨迹生成和编辑后,可以通过视图显示功能查看。
拾取工件轨迹后,利用Roboguide中的Feature功能自动生成离线程序。程序中机器人的运行速度通过Prog设置菜单进行设置。Pos默认对话框中修改程序的机器人姿态,通过调整机器人TCP X, Y,和Z轴,TCP和生成的轨迹的机器人运行方向路径,改变TCP操作方向的过程中,也可以通过显示模拟焊抢位置的方向观察设置TCP的方向是否合理。
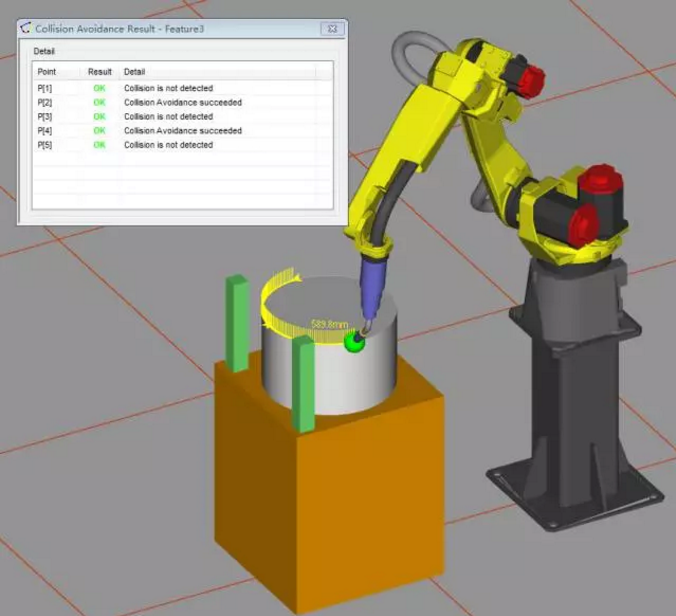
使用Pos偏移选项,您可以在各个方向翻译和旋转离线程序。也可以在程序运行时设置焊抢在X、Y、Z轴的角度。完成上述设置后,就可以生成脱机程序了。此时,机器人运行自动生成的程序时,可能会出现焊抢与夹具之间的干扰。这就需要使用避碰自动回退功能来避免干扰。在机器人与夹具的干涉区,通过调整焊抢的角度,机器人可以自动改变运动轨迹绕过干涉区。之后,在自动生成的碰撞检测结果中可以清晰地看到避碰点。
Optimize position功能
机器人的运行程序是通过人工指令或离线编程自动生成的。在这些程序中,机器人往往没有处于理想位置,导致机器人的运行轨迹更长,运行时间更长。和优化位置函数Roboguide可以优化系统优化优化系统,减少机器人的能耗,增加机器人的生活通过调整优化机器人的位置(对象)在机器人和不受干扰的运动过程。
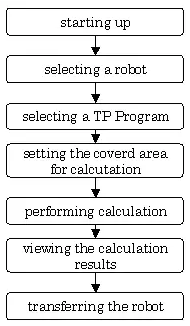
优化位置函数的基本步骤如下:打开优化位置窗口→选择机器人(对象)→选择TP程序→设置→运行优化区域计算计算→查看计算结果→改变机器人(对象)位置生成一个新的项目。
使用Optimize position功能时,主要的是确定计算区域和划分出机器人位置点。计算区域是通过设定X、Y和Z轴三个方向上的MAX和MIN来确定的,而机器人位置点的划分是通过设定标度MIN值实现的。选取的计算区域越大,划分的点越多,计算时间越长。
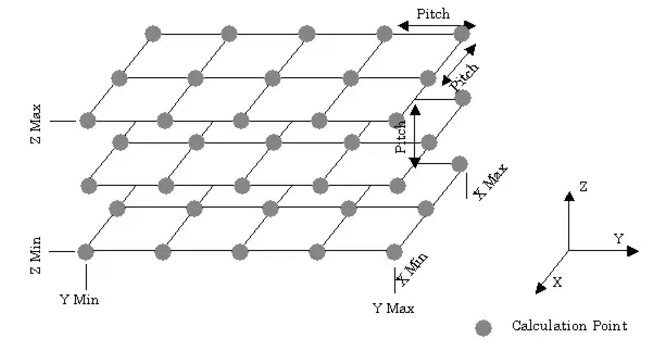
Optimize position功能采用逐个比较法,通过指定优化区域,划分计算点,逐个计算机器人(物体)系统的运动时间,分析机器人的可达性和可达性,之后在计算点中选取理想值。在运用Optimize position功能时,需要注意以下几个问题:
1、用户所选取的优化范围可能在实际优点范围之外;
2、划分的小标度值较大,实际理想值不在所划分的点上;
3、如果将小标度值设置更小,所需要计算的点将会大幅增加,计算的时间也就越长。
Optimize position功能还可以添加以下评估参数:Duty information (Over heat, OVC) 机器人工作状况信息、Power consumption information (average power) 耗电量信息和Reducer life information (L10 life) 减速机寿命信息。
机器人工作状况信息:

耗电量信息:

减速机寿命:

在优化结果中包含以下信息:Time:循环时间(系统节拍);OH:过热百分比MAX;OVC:过电流MAX百分比;Power:平均功率(KW);Life: 寿命MIN(年);Limit:表示机器人姿态的余量,数字越小,余量越多。
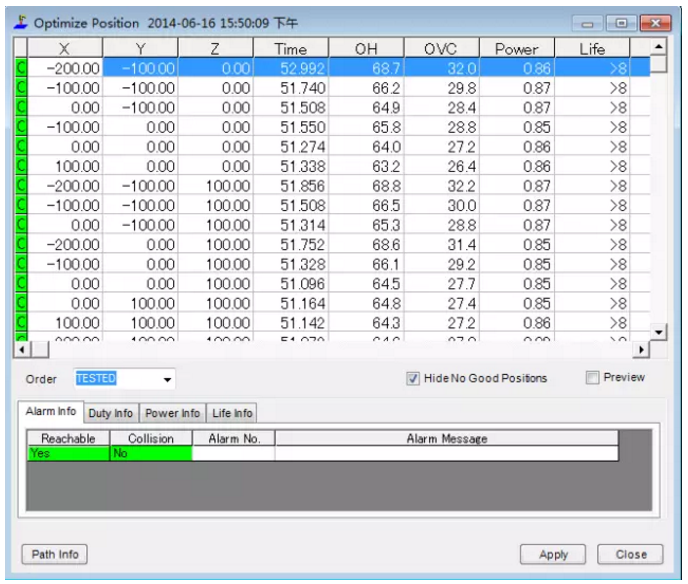
之后通过点击Apply按钮,机器人会自动地运行到计算结果中的理想位置点处,同时原有的程序将会被覆盖掉生成新的程序。在这之前建议备份原程序。
转载于网络
更多发那科机器人请点击:发那科机器人
